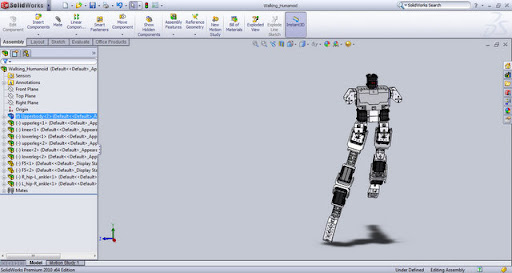
Using the 3D models of components from the Bioloid robot kit available from http://humanoids.dem.ist.utl.pt, we built in SolidWorks the 3D model of our Kangaroo Robot (download SolidWorks Model).
The objective is to calculate the mechanical proprieties (inertial moment, weight, center-of-mass) of each part of robot’s body (torso, hip, upper leg, etc…) and also create a WRL model that can be animated by MatLab/Simulink.
The Kangaroo (a.k.a Jakobian1) has 11 different sub-assemblies/parts (torso and two for each hip, upper and lower leg and knee for each leg). Mechanical properties need to be calculated for each in order to model the structure and be able to control its motion.
By enabling axis constraints, we can even mold the robot into some inspirational poses.

Now waiting to hear from Robotis if they can provide the material mechanical properties in order to be able to simulate impact and spring-like behavior of the structure which will be helpful/detrimental in getting this thing to balance and run. According to SolidWorks, Material’s mechanical properties are completely defined by the following parameters:
- Elastic modulus (N/m^2)
- Poisson ratio
- Sheer modulus (N/m^2)
- Mass density (kg/m^3)
- Tensile strength ((N/m^2)
Another important piece of information needed to model and control the robot are the properties of the AX12 actuators. Hopefully we’ll find this on the IST humanoid site and otherwise on RoboSavvy.com and the rest of the web.

Leave a comment