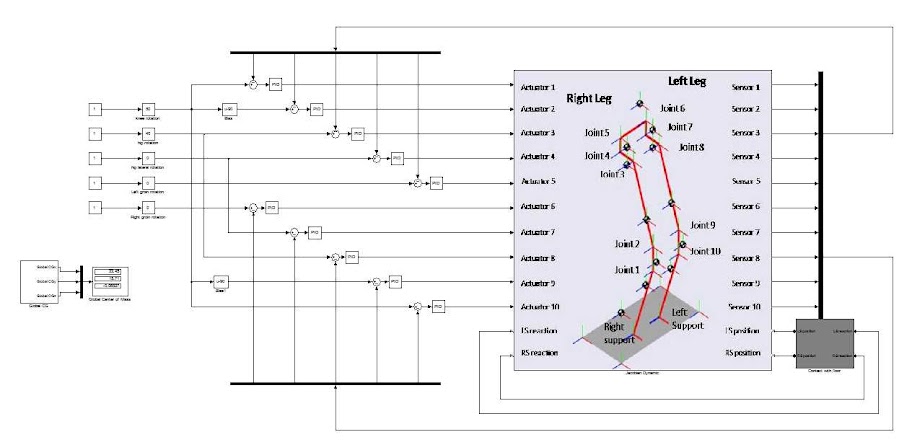
The Simulink model of Jacobian has a close loop for each joint with a PID controller to keep all joints in a predefined position, another close loop to simulate the contact with the ground and a block to estimate the global center of mass of Jacobian.
The simulink model was built with SimMechanics blocks where each body block has the values of mass, center of mass and inertia (from here) and joints coordinates acquired from 3D model.
In this model is possible to simulate movements of joints but, at a moment, the knee and hip rotations is equals to the both legs.
You can download the report and matlab/simulink files.
The next steps are the control of equilibrium of Jacobian. First we will control the equilibrium with two legs on the ground and later with only one.
To finalize the equilibrium control of Jacobian, we will do it when the humanoid stand down and up, bending the knees.

Leave a comment